Intelligent Transportation Systems
Mobility & Safety Benefits with V2X communications
The focus is on establishing the benefits of mobility and safety with V2X communications in various applications. In Infrastructure Enabled Autonomy applications, the idea is to reduce the sensor burden on autonomous vehicles by pushing the localization tasks and sensing to Infrastructure and getting that information via paid V2X communication service. In Infrastructure-less applications such as convoying in military applications, I am interested in V2V communication for integrated longitudinal and lateral control without any roadside information. In both cases, I am interested in looking at imperfect communications – limited bandwidth, packet losses, SNR issues, etc.
Traffic Modeling with different classes of vehicles
 As a point of departure, I proposed almost a decade back a preliminary traffic model that contains representatives for each class and models the interactions between each class of vehicles. Recently, I have been examining the effect of sequencing heterogeneous vehicles in a collection on disturbance propagation in this regard.
As a point of departure, I proposed almost a decade back a preliminary traffic model that contains representatives for each class and models the interactions between each class of vehicles. Recently, I have been examining the effect of sequencing heterogeneous vehicles in a collection on disturbance propagation in this regard.
Development of Truck Brake Diagnostics
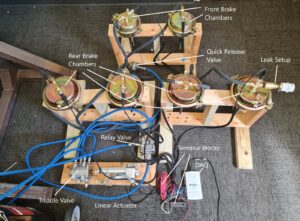
I am interested in developing diagnostic systems that require some retrofitting of pipes with specialized pressure sensors and use ML algorithms that do not require too many system parameters to assess the health of truck brakes. I am currently working in this direction on this topic.
Autonomy
Assisted Routing of Heterogeneous Collection of Vehicles
In Convoy Escort applications, a convoy of vehicles starts from their respective depot and delivers goods to the specified destination. However, some road segments may need servicing to clear the obstacles or threats. A set of service/escort vehicles with additional servicing capabilities may be employed to help the convoy along the way. The travel and servicing costs for convoy and escort may be different. The question is how one should coordinate the motion of escort vehicles (assets) be coordinated with that of convoys to deliver goods at the cheapest cost.
Path Planning for UAVs with fuel constraints
Long-duration autonomy applications require mobile charging stations for enabling UAVs to fly for a long time owing to their limited online battery resources. The mobile charging station may have a finite number of charging slots. The problem is to coordinate the motion of the mobile charger with that of the UAVs and schedule them so as to increase the duration of the mission without human involvement while minimizing the time between revisits to points of interest (POIs) in persistent surveillance applications.
Discrete Optimization Applications in Vehicular Applications
Routing of Dubins’ vehicles
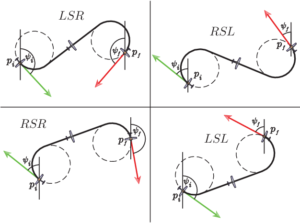
The cost of a tour for persistent surveillance depends on the heading angles at which a UAV arrives at a POI and the sequence in which the UAVs visit them. The underlying problem couples the discrete optimization problem of sequencing with that of the continuous variables (headings). Our focus has been on developing efficient, implementable algorithms that provide a posteriori sub-optimality bounds for the feasible solutions our algorithms generate.
Maximization of Algebraic Connectivity
 In Pose-Graph SLAM and other network applications, there is a need to maximize the algebraic connectivity of a graph subject to resource constraints. Our group has developed a cutting plane approach based on Sylvester’s characterization of positive definite matrices to improve on the existing methods for this NP-hard, Mixed-Integer Semi-definite problem.
In Pose-Graph SLAM and other network applications, there is a need to maximize the algebraic connectivity of a graph subject to resource constraints. Our group has developed a cutting plane approach based on Sylvester’s characterization of positive definite matrices to improve on the existing methods for this NP-hard, Mixed-Integer Semi-definite problem.
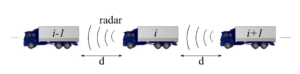
Effect of Permutation of Vehicle Position in a String on the disturbance propagation

Typically, drivers choose time headway according to their perceived safety and comfort. The spacing errors in a vehicle string depend on how the drivers are permuted (as in commuter traffic, where the same set of drivers enter the highway but not necessarily in the same order). The underlying problem is to examine how the lead vehicle maneuver affects the spacing error in the last vehicle in the string.